



您的位置:上海毫米网络优化公司 > TAG标签 >
相关推荐recommended
- HTTP 请求头中的 Remote
- 使用 Ubuntu 安装最新版本的 Node.js
- Nginx 【location配置路径详解、反向代理、负载均衡】
- springboot项目报Could not resolve view
- maven打包失败:the pom for XXX is missin
- SQL server数据库期末大作业
- 使用HttpURLConnection发送POST请求并携带请求参数
- SpringGateway网关
- SpringBoot与MybatisPlus SpringBoot
- KAFKA (2.12-2.2.1)常用命令和kafka tool 工
- MySQL之触发器
- 基于PHP和MySQL的新闻发布系统——【功能优化】
- SpringBoot核心运行原理解析之-------@EnableAu
- Springboot MyBatis实现多数据源切换和主从复制(读写分
- RocketMQ 学习教程——(二)SpringBoot 集成 Roc
- <SpringBoot笔记>SpringBoot版本降级
- (Linux)Centos7.*版本安装配置Java环境、Tomcat
- MySQL--事务详述
- MySQL数据库——MySQL REGEXP:正则表达式
- Spring Boot @Scheduled 定时任务运行一段时间后自
- 【MySQL】MySQL基本语句大全
- Spring Boot--Freemarker渲染技术+实际案例
- IDEA 开发一个简单的 web service 项目,并打包部署到
- SpringBoot整合POI实现Excel文件读写操作
- 【爬虫实战】用python爬豆瓣电影《热烈》的短评!
- 在springBoot中使用JWT实现1.生成token,2.接收前端
- 在线SQL格式化工具
- 群晖Drive搭建结合内网穿透实现云同步Obsidian笔记文件
- Spring中的@Transactional注解配置、rollback
- QT实现登录界面(利用MySQL保存数据和邮箱辅助注册)
舵机
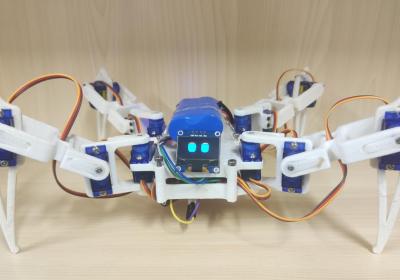 12-1423基于STM32与PCA9685制作四足机器人(代码开源)
12-1423基于STM32与PCA9685制作四足机器人(代码开源)前言:本文为手把手教学基于STM32的四足机器人项目——JDY-31蓝牙控制,特别地,本次项目采用的是STM32作为MCU。四足机器人的支架为3D打印件,SG90舵机驱动机器人实现姿态运动。借助PCA9685舵机驱动板实现12路PWM波控制...

- 关注我们
- 扫描二维码
- 获取更多信息
- 精彩一手掌握
Copyright © 2014-2019 seo,上海网站优化_网络制作_网站seo排名_网站建设推广_上海网络公司 版权所有
 沪ICP备19022315号
沪ICP备19022315号







